

TECHNOLOGIES OF RTLS POSITIONING
Outdoor and Indoor positioning technologies are different. Outdoor positioning is widely known for GPS or Glonass satellite navigation. But what types of indoors technologies are the most appropriate for various purposes? People have limited information in the matter of this topic. What technologies are better, how much do you need to charge for its implementation? Other aspects are also of customers’ interest. We make a specialty out of software and solution development using indoor positioning and navigation.
TECHNOLOGIES OF RTLS POSITIONING
Outdoor and Indoor positioning technologies are different. Outdoor positioning is widely known for GPS or Glonass satellite navigation. But what types of indoors technologies are the most appropriate for various purposes? People have limited information in the matter of this topic. What technologies are better, how much do you need to charge for its implementation? Other aspects are also of customers’ interest. We make a specialty out of software and solution development using indoor positioning and navigation.
Indoor positioning systems (IPS) use sensors and communication technologies to determine the location of indoor objects. In comparison with GPS technology where the positioning accuracy for commercial purposes is within 5 meters, indoor positioning technologies have to demonstrate more accurate results. For example, merchandisers using navigation technologies identify the shelf in the store where the goods are located. This way customers get precise information and are glad with their purchases.
Take a closer look at the overview of positioning technologies:
| Technology | Accuracy | Coverage | Price | Strengths | Weak Points |
| Infrared Light | 57 cm – 2.3 m | Room | Equipment cost: high
Maintenance charge: low |
Medium price | Susceptibility to sunlight |
| VLC | 10 cm | Building | Equipment cost: high
Maintenance charge: low |
Affordable price, robustness | Expensive equipment |
| Ultrasonic | 1 cm – 2 m | Room | High costs | High-level positioning accuracy | Expensiveness |
| Wi-Fi | within 5 m | Building | Low equipment and maintenance costs | Low price, average positioning accuracy | vulnerability while connecting access points |
| iBeacon | 30 cm – several meters | Building | Low cost | Low cost, the high-level positioning accuracy | Equipment check-out is a must in course of installation |
| ZigBee | 25 cm | Building | Equipment cost: low
Maintenance charge: high |
The already-done (existing) Zigbee infrastructure can be used | Special equipment is required, positioning accuracy depends on environment and physical factors |
| RFID | 1-5 m | Room | Equipment cost: high
Maintenance charge: low |
Extremely low prices while using passive equipment for large-volume performance | Low-level positioning accuracy |
| UWB | 15 cm | Building | High costs | High-level positioning accuracy | Expensiveness |
| Passive technologies without signal coding | |||||
| Earth magnetic field | 2-5 m | Low cost | Infrastructure is not required, average positioning accuracy | Geo-map data-binding is required | |
| Automated (computer) vision | from 1 cm to several meters | Low cost | Affordable prices | Susceptibility to illumination, confidentiality | |
| Inert sensors of the smartphone | up to 2-3 m | Low cost | Affordable costs, available geolocation data privacy | Low-level accuracy | |
Spheres of Application of Indoor Positioning Systems
Advertising, merchandising. Analysis of customer behavior, analyzing of preferences. Generation of personalized marketing promotions and special offers.
Workplace safety. Occupational safety. Real-time tracking of people movements, control of all the visited areas.
Equipment Inventory. Equipment transfers between buildings, workshops. Tracking of process parameters.
Personnel discipline. Control over working processes, and staff supervision. Automatic algorithms and tools for performance monitoring and observance of rules and regulations.
POSITIONING TECHNOLOGIES
Optical and Infrared Technologies
Optical and infrared technologies have specialized applications. They are usually used for determining stationary object mobility. Infrared technologies produce electromagnetic radiation at a wavelength greater than visible spectral light. The principle of operation is based on the infrared-spectrum diode that emits eye-invisible light while the photodiode receiver gets light pulses. Optical technologies are considered as the form of electromagnetic radiation. At the same time, it differs in physical properties. Optical technologies are notable with the range of limitations in the absence of optical beam visibility.
VLC - Visible Light Communication
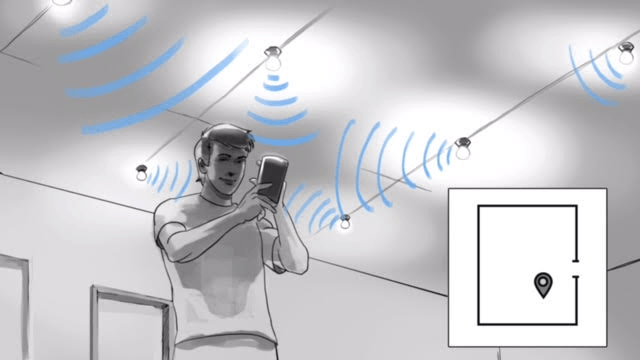
The VLC technology uses visible light for data transmitting. It is known that LED light bulbs are the most suitable ones for the process of information transmission. The possibilities of data transferring reside in the impulse. It is invisible for the human eye both during switching-in the light and turning it off.
Each light bulb has its own flicker degree. Thus, the receiving sensor attains light and compares it with the light modulation of the encoded circuits. It means that VCL technologies allow determining the location of the user with such a sensor. The most common receiver nowadays is a mobile phone with a camera that can specify the frequency level of light flickering. Famous vendors who offer various solutions based on visible light communication technology are Philips, Gelighting, and ByteLight.
Each light bulb has its own flicker degree. Thus, the receiving sensor attains light and compares it with the light modulation of the encoded circuits. It means that VCL technologies allow determining the location of the user with such a sensor. The most common receiver nowadays is a mobile phone with a camera that can specify the frequency level of light flickering. Famous vendors who offer various solutions based on visible light communication technology are Philips, Gelighting, and ByteLight.
Ultrasound
The Ultrasonic location based system uses sound vibrations (oscillations) below 20Khz (tones are lower than the human ear sensitivity level). The principle of operation consists in the sonar (ultrasound scanner) which is based on measuring the time of transmission of the reflected signal. There are passive and active types of systems. As an example of the active system is the Bat System company. The manufacturer offers the system based on the radiator tag use for a person and microphones for signal capturing. Then the acquisition calculation takes place through trilateration algorithms.
Also, by determining the direction of radiation, the object movement trajectory can be found. The accuracy of positioning is within 3 cm. An example of this technology is the Cricket passive system where the user 's wearable tag acts as a receiver and the emitter is mounted on the ceiling. The Ultrasonic technology is vulnerable due to the numerous active labels tags at the moment. It affects the performance of the positioning system. Nevertheless, Schweinzer and Syafrudin managed to achieve an accuracy of 1 cm.
Also, by determining the direction of radiation, the object movement trajectory can be found. The accuracy of positioning is within 3 cm. An example of this technology is the Cricket passive system where the user 's wearable tag acts as a receiver and the emitter is mounted on the ceiling. The Ultrasonic technology is vulnerable due to the numerous active labels tags at the moment. It affects the performance of the positioning system. Nevertheless, Schweinzer and Syafrudin managed to achieve an accuracy of 1 cm.
WI-FI-Based Positioning
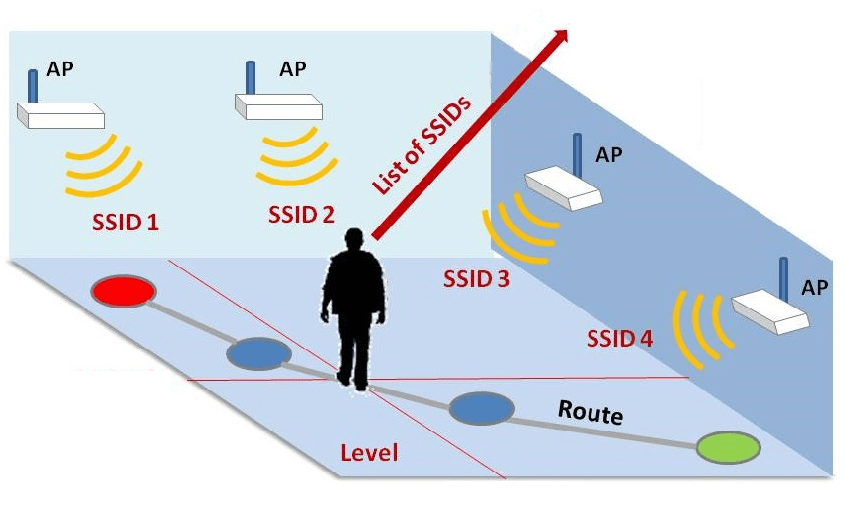
WIFI-based positioning technologies are widely used. There are three well-known models to take into consideration: (1) Signal propagation model up to the familiar (known) base station; (2) the signal level is enough up to several WIFI access points (Aps) for multilateralization; (3) Fingerprinting: templates of known WIFI stations with a certain signal level are compared with records in the database on signal level in different locations of the building. The first system was called RADAR. It was presented by Microsoft corporation. RADAR used the first (1) and the third (3) methods.
The accurate location of the walls and floor was taken into account in the coordinate calculation algorithm. The classic of the positioning genre on WIFI is considered Freeloc where clients used a mobile app. But on account of the fact that all the phones differed in signal level, this positioning model had unideal accuracy. A commercially successful project by Ekahau found market acceptance due to the excellent WIFI accuracy within 3 meters. The user has to wear a wristband with a WIFI receiver. Location data is sent periodically to the server.
The accurate location of the walls and floor was taken into account in the coordinate calculation algorithm. The classic of the positioning genre on WIFI is considered Freeloc where clients used a mobile app. But on account of the fact that all the phones differed in signal level, this positioning model had unideal accuracy. A commercially successful project by Ekahau found market acceptance due to the excellent WIFI accuracy within 3 meters. The user has to wear a wristband with a WIFI receiver. Location data is sent periodically to the server.
UWB Technology (ULTRA WIDE BAND)
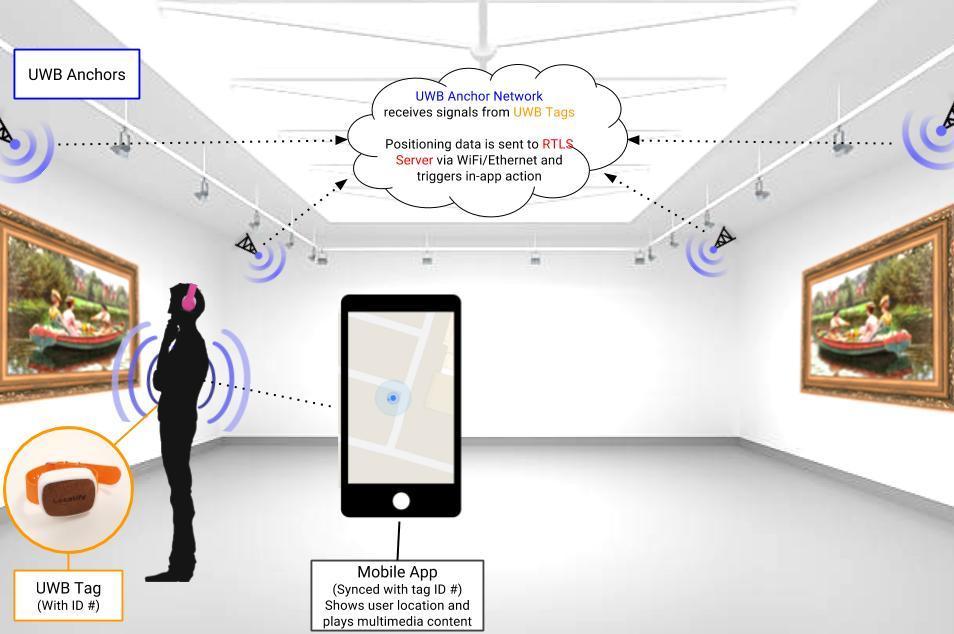
UWB is based on the transmission of ultra-wideband forms of electromagnetic waves formed by the short-pulse sequence with a very large bandpass (transmission band). UWB spheres of application are cable TV, movement tracking equipment, highly-permeable radar systems, other tracking and positioning programs. UWB is used in indoor positioning systems due to energy efficiency, high accuracy of pulse transmission time measurement. The multibeam signal transmission capability is also available.
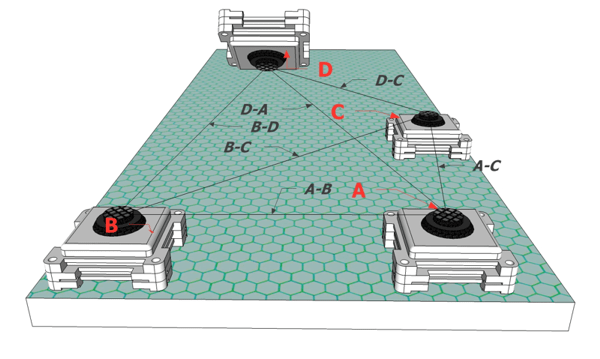
There are two UWB measurement methods used in RTLS systems: Time of Arrival (ToA) and Time Difference of Arrival (TDOA). IPS for the UWB technology runs on 4 fixed UWB anchors (readers). Mobile user location is calculated using triangulation algorithms using the TDoA method between receiver and transmitter. Position accuracy is up to 1 meter at 528 MHz. It is worth nothing that the efficient UWB technology model has limitations: the spectrum of radio emission is very small - interference with signals of WiFi, cellular communication; UWB equipment calibration complexities take place – e.g. time-consuming process; data network limits - all readers must be synchronized with a stable real-time IP network. Flagship UWB solution developers are considered Redpoint positioning; DecaWave; Zebra.
There are two UWB measurement methods used in RTLS systems: Time of Arrival (ToA) and Time Difference of Arrival (TDOA). IPS for the UWB technology runs on 4 fixed UWB anchors (readers). Mobile user location is calculated using triangulation algorithms using the TDoA method between receiver and transmitter. Position accuracy is up to 1 meter at 528 MHz. It is worth nothing that the efficient UWB technology model has limitations: the spectrum of radio emission is very small - interference with signals of WiFi, cellular communication; UWB equipment calibration complexities take place – e.g. time-consuming process; data network limits - all readers must be synchronized with a stable real-time IP network. Flagship UWB solution developers are considered Redpoint positioning; DecaWave; Zebra.
iBeacon-based Indoor Positioning
iBeacon based on Bluetooth technology. This type of indoor positioning is considered as an alternative to WIFI-based positioning systems. It is worth noting that iBeacon uses energy-saving BLE (Bluetooth Low Energy) technology that differs it from other analogs. Bluetooth option is a widespread one in the gadget function set. Almost every smartphone obtains this option. That is why use of iBeacon became popular in retail and consumer applications. Mass production allows manufacturers to establish low-cost infrastructure for iBeacon technology. iBeacon IPS requires use of mobile phones - the receiver of a signal and iBeacon beacons - the transmitter of a signal, established indoors stationary. The second variant of implementation is iBeacon RTLS: stationary iBeacon receivers and mobile iBeacon transmitters.
A Bluetooth-oriented positioning system according to the Feldmann method uses triangulation on the RSSI signal and positioning accuracy of 2-3 meters. The accuracy is affected by signal distortions because the signal fidelity is severely reduced under some factors. For example, a user is located between the receiver, transmitters, the directional angle of the BLE signal. The commercial use of the iBeacon technology model was offered by Apple. The focal length by signal level is possible at distances up to 50 cm, from 50 cm to 2-5 meters, and 2-5 meters to 30 meters. Accuracy also depends on physical parameters and possible barriers. Bluetooth signals have not got stable measurements. So, the developers of iBeacon-based RTLS systems use fingerprint methods to improve the level of signal fidelity and positioning.
A Bluetooth-oriented positioning system according to the Feldmann method uses triangulation on the RSSI signal and positioning accuracy of 2-3 meters. The accuracy is affected by signal distortions because the signal fidelity is severely reduced under some factors. For example, a user is located between the receiver, transmitters, the directional angle of the BLE signal. The commercial use of the iBeacon technology model was offered by Apple. The focal length by signal level is possible at distances up to 50 cm, from 50 cm to 2-5 meters, and 2-5 meters to 30 meters. Accuracy also depends on physical parameters and possible barriers. Bluetooth signals have not got stable measurements. So, the developers of iBeacon-based RTLS systems use fingerprint methods to improve the level of signal fidelity and positioning.

RFID-Based Indoor Positioning Technologies
Radio Frequency Identification (RFID) uses radio waves to generate a response pulse as a unique RFID tag. The system consists of an RFID reader and RFID tags as well. The RFID tag or transponder has a built-in microchip and a printed antenna capable of emitting a radio signal. Depending on the method of radio signal emission, there are passive (form a weak pulse at contact with the antenna) and active tags (have their own energy source and form a pulse periodically). One more type of tag is available. It is a semi-active tag with a small-size accumulator that forms a pulse while contacting the antenna.
There are numerous spheres of RFID application: safety sector, object tracking (people and equipment), baggage movement monitoring at the airport, logistics (warehouses), etc. RFID is extremely effective in case it is necessary to track object movements at checkpoints rather than on a permanent basis. LANDMARC (Location Identification based on Dynamic Area RFID Calibration) is a pioneer model in RFID systems. This positioning technology is based on principles of intensity of emitted signal from tag to antenna using the algorithm of the nearest neighbor k-NN. The nearest neighbor is used for the LANDMARC model. The accuracy of the method is up to 1 meter. The key vulnerability of RFID technology for RTLS positioning provision is delays. The SeSaMoNet offered an alternative method - a mobile RFID reader and stationary RFID tags. The technology was used to work on the street. The principle is similar to iBeacon technology, but with another accuracy showing - to 25 cm.
One more variation of RFID is NFC (Near field communication) technology. NFC modules are built into many user phones. The NFC model requires two-way communication between reader and emitter. NFC technology is used in payment systems, and can be implemented for efficient area control while the tracking of the objects’ movement is needed (both people and equipment can be monitored this way).
There are numerous spheres of RFID application: safety sector, object tracking (people and equipment), baggage movement monitoring at the airport, logistics (warehouses), etc. RFID is extremely effective in case it is necessary to track object movements at checkpoints rather than on a permanent basis. LANDMARC (Location Identification based on Dynamic Area RFID Calibration) is a pioneer model in RFID systems. This positioning technology is based on principles of intensity of emitted signal from tag to antenna using the algorithm of the nearest neighbor k-NN. The nearest neighbor is used for the LANDMARC model. The accuracy of the method is up to 1 meter. The key vulnerability of RFID technology for RTLS positioning provision is delays. The SeSaMoNet offered an alternative method - a mobile RFID reader and stationary RFID tags. The technology was used to work on the street. The principle is similar to iBeacon technology, but with another accuracy showing - to 25 cm.
One more variation of RFID is NFC (Near field communication) technology. NFC modules are built into many user phones. The NFC model requires two-way communication between reader and emitter. NFC technology is used in payment systems, and can be implemented for efficient area control while the tracking of the objects’ movement is needed (both people and equipment can be monitored this way).

Positioning Systems with Computer (Automated) Vision Technology
The IPS system with computer (automated) vision collects information from installed cameras. It identifies objects and monitors their movement. Two types of positioning systems with computer vision should be taken into consideration: passive approach (the user or object initiates camera tracking of some object) or active approach (the system identifies the object automatically and tracks its movement). Some developers use Visual Odometry (VO) to update user movement information. The VO evaluates the movement process of a person or equipment using one or more cameras for this purpose. Kitt achieved the best results using developed filters for stereo-images. One of the latest developments is MoVOIPS. It uses a passive approach based on mobile phone camera processing. Calibration and localization are required to operate the system. The calibration phase is designed to create a large number of photos from a user 's mobile phone about its location.
In the localization phase, the user takes a picture of the environment and downloads it to the server. The server runs a SURF algorithm that compares a user’s photo with the reference image in the database. Once the photo is identified, the user 's location can be estimated accurately. Developers assure that the average accuracy can be up to 1.3 meters. The vulnerability of the system takes place when the video or photo content has the low-grade resolution. The SignPost system is used for indoor positioning and works together with Barcode 2D. The smartphone camera scans barcodes in constant mode. This project with an active smartphone camera approach was launched by Microsoft EasyLiving. It was used for personnel tracking and visual interaction of people on behavioral factors. The application of the indoor positioning system based on computer (automated) vision is widely used in offices, business centers, shopping centers, etc.
In the localization phase, the user takes a picture of the environment and downloads it to the server. The server runs a SURF algorithm that compares a user’s photo with the reference image in the database. Once the photo is identified, the user 's location can be estimated accurately. Developers assure that the average accuracy can be up to 1.3 meters. The vulnerability of the system takes place when the video or photo content has the low-grade resolution. The SignPost system is used for indoor positioning and works together with Barcode 2D. The smartphone camera scans barcodes in constant mode. This project with an active smartphone camera approach was launched by Microsoft EasyLiving. It was used for personnel tracking and visual interaction of people on behavioral factors. The application of the indoor positioning system based on computer (automated) vision is widely used in offices, business centers, shopping centers, etc.

MERUSOFT TRACKING – THE UNIVERSAL PLATFORM FOR RTLS SOLUTION DEVELOPING
We develop business applications based on indoor positioning technologies. Our consultants have extensive experience of work with various IPS (indoor positioning system) technologies. We develop mobile applications for indoor navigation using iBeacon technology. Our solutions are implemented on the territory of different objects: offices and business centers, shopping centers and malls. We use computer (automated) vision to provide clients with helpful options. People get actual data with the help of their smartphones. Business applications for industrial enterprises are based on UWB, iBeacon, GPS and NB- IoT technologies. Our Merusoft Tracking platform obtains built-in capabilities for tracking the movement of personnel and equipment, monitoring visits to prohibited areas, etc. One more important option the platform provides customers with is a built-in algorithm for detecting contacts between people. We offer automated solutions to control the safe distance of personnel on the territory of industrial, public, residential and non-residential objects.